Deep learning-based reduced order models for the real-time simulation of the nonlinear dynamics of microstructures
Abstract
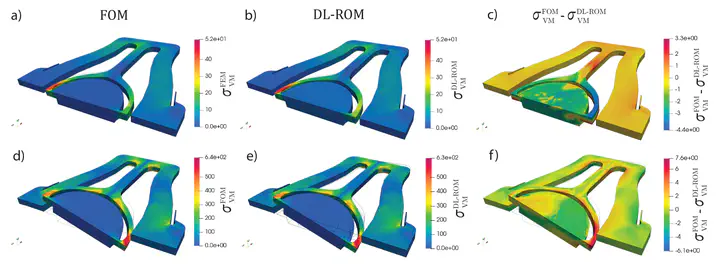
We propose a non-intrusive deep learning-based reduced order model(DL-ROM) capable of capturing the complex dynamics of mechanical systemsshowing inertia and geometric nonlinearities. In the first phase, a limited num-ber of high fidelity snapshots are used to generate a POD-Galerkin ROM whichis subsequently exploited to generate the data, covering the whole parameterrange, used in the training phase of the DL-ROM. A convolutional autoencoderis employed to map the system response onto a low-dimensional representa-tion and, in parallel, to model the reduced nonlinear trial manifold. The systemdynamics on the manifold is described by means of a deep feedforward neuralnetwork that is trained together with the autoencoder. The strategy is bench-marked against high fidelity solutions on a clamped-clamped beam and on areal micromirror with softening response and multiplicity of solutions. By com-paring the different computational costs, we discuss the impressive gain inperformance and show that the DL-ROM truly represents a real-time tool whichcan be profitably and efficiently employed in complex system-level simulationprocedures for design and optimization purposes.
Stefania Fresca
Assistant Professor
My research interests are scientific machine learning, reduced order modeling and AI.